1. Tujuan Sistem
[Back]2. Daftar Komponen
[Back]- Arduino Uno 2 buah

- Rain Sensor

- LCD 16x2


- nRF24I01 WIFI

- Motor Servo

- Trimpot 103

- Bread Board

3. Landasan Teori
[Back]
Dalam perancangan sistem, digunakan satu sensor hujan FC-37 dengan output pergerakan motor servo.
Sensor Hujan FC-37

Rain Sensor ini memiliki teori mendasar yang diambil dari Resistive Humadity Sensor, dimana sensor ini tersusun secara paralel dari konduktor-konduktor yang diletakan pada sebuah papan film pada jarak tertentu, dengan kata lain dengan tersusunnya konduktor-konduktor tersebut pada jarak yang telah ditentukan maka seolah-olah kita memberikan resistansi yang besar bagi arus listrik yang mengalir pada konduktor-konduktor tersebut, berdasarkan rumus V = IR,kita dapat memainkan tegangan dengan resistasi yang berubah-ubah tersebut. Bentuk gambar papan film seperti berikut :



Prinsip kerja dari Film board ini
- Ketika konduktor-konduktor yang tersusun secara paralel tersebut terkena mengenai air, maka arus listrik yang mengalir akan lebih mudah dibandingkan tidak ada air, karena celah-celah yang diberikan kepada konduktor-konduktor tersebut berkurang sehingga resistanis yang awalnya cukup besar menjadi berkurang sesuai dengan kadar air yang tersentuh konduktor-konduktor papan film tersebut
- Semakin banyak air yang tersentuh oleh konduktor-konduktor papan film tersebut, maka semakin kecil pula resistansinya, sehingga berdasarkan Hukum Khirchoff :
V = I . R
Tegangan yang dihasilkan semakin kecil, dan begitu sebaliknya.
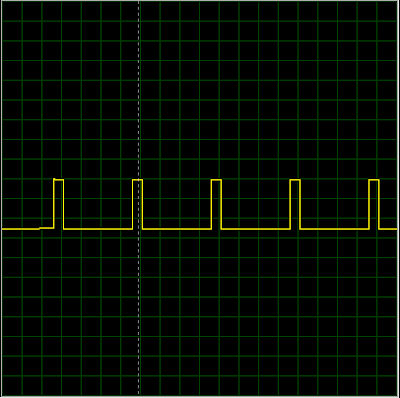
Grafik Sensor


Pengujian Alat


Grafik diatas merupakan invers output dari sensor hujan sebelum masuk ke converter digital


Grafik diatas menunjukkan bahwa Output dari sensor yang telah dikonversikan ke sinyal digital, pada hujan ringan dengan 400cc/menit dan untuk hujan biasa berupa 900cc/menit.

Apabila tingkat intensitas tegangan hujan semakin kecil, maka resistansinya meningkat dan tegangan ouput semakin besar. Sensitivas pada sensor ini dapat diatur dengan mengubah potensiometer yang terdapat pada modul LM393.
Modul LM393
LM393 adalah Komparator yang di dalamnya terdapat dua Komparator tegangan yang independent. Komparator ini didesain dapat beroperasi pada single power supply dengan tegangan dari 2 sampai 36 volt.

Alasan menggunakan komparator ini karena komparator ini dapat beroperasi tanpa catu daya negatif. Selain itu komparator ini dapat bekerja hanya dengan tegangan 5 volt. Tegangan 5 volt merupakan catu daya yang biasa digunakan mikrokontroler sehingga catu daya dapat diambilkan dari catu daya mikrokontroler apabila sistem yang dibuat menggunakan mikrokontroler.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :
Adapun spesifikasi untuk LM393
Wide Single-Supply Range
|
2-36 V
|
Split-Supply Range
|
±1.0 V to ± 18V
|
Very Low Current Drain Independent of Supply Voltage
|
0.4 mA
|
Low Input Bias Current
|
25nA
|
Low Input Offset Current
|
5.0 nA
|
Low Input Offset Voltage
|
5.0 mV
|
Input Common Mode Range to Ground Level
| |
Differential Input Voltage Range Equal to Power Supply Voltage
| |
Alasan menggunakan komparator ini karena komparator ini dapat beroperasi tanpa catu daya negatif. Selain itu komparator ini dapat bekerja hanya dengan tegangan 5 volt. Tegangan 5 volt merupakan catu daya yang biasa digunakan mikrokontroler sehingga catu daya dapat diambilkan dari catu daya mikrokontroler apabila sistem yang dibuat menggunakan mikrokontroler.
Arduino Uno
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :
Microcontroller ATmega328P
|
Operating Voltage 5 V
|
Input Voltage (recommended) 7 – 12 V
|
Input Voltage (limit) 6 – 20 V
|
Digital I/O Pins 14 (of which 6 provide PWM output)
|
PWM Digital I/O Pins 6
|
Analog Input Pins 6
|
DC Current per I/O Pin 20 mA
|
DC Current for 3.3V Pin 50 mA
|
Flash Memory 32 KB of which 0.5 KB used by bootloader
|
SRAM 2 KB
|
EEPROM 1 KB
|
Clock Speed 16 MHz
|
BAGIAN-BAGIAN ARDUINO UNO
POWER USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
POWER JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino.
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino.
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
LCD (Liquid Crystal Display)
LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah :
- Lapisan Terpolarisasi 1 (Polarizing Film 1)
- Elektroda Positif (Positive Electrode)
- Lapisan Kristal Cair (Liquid Cristal Layer)
- Elektroda Negatif (Negative Electrode)
- Lapisan Terpolarisasi 2 (Polarizing film 2)
- Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD :

Register control yang terdapat dalam suatu LCD diantaranya adalah.
~ Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses penulisan data atau tempat status dari panel LCD (Liquid Cristal Display) dapat dibaca pada saat pembacaan data
~Register data yaitu register untuk menuliskan atau membaca data dari atau keDDRAM. Penulisan data pada register akan menempatkan data tersebut keDDRAM sesuai dengan alamat yang telah diatur sebelumnya.
Pin, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal Display) diantaranya adalah :
· ~ Pin data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakan LCD (Liquid Cristal Display) dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
· ~Pin RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data.
· ~Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data.
· ~Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar.
~Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.

NRF24l01
Komunikasi yang dilakukan antar arduino digunakan adalah Modul Wireless nRF24L01. Modul Wireless nRF24L01 adalah sebuah modul komunikasi jarak jauh yang memanfaatkan pita gelombang RF 2.4GHz ISM (Industrial, Scientific and Medical). Modul ini menggunakan antarmuka SPI untuk berkomunikasi. Tegangan kerja dari modul ini adalah 5V DC.
– Beroperasi pada pada pita ISM 2.4 GHZ.
– Data rate hingga 2Mbps.
– Ultra low power.
– Penanganan paket data otomatis.
– Penanganan transaksi paket otomatis.
- Range up 1100 Meter
Modul ini memiliki 8 buah pin, diantaranya :
– Beroperasi pada pada pita ISM 2.4 GHZ.
– Data rate hingga 2Mbps.
– Ultra low power.
– Penanganan paket data otomatis.
– Penanganan transaksi paket otomatis.
- Range up 1100 Meter
Modul ini memiliki 8 buah pin, diantaranya :
- VCC (3.3V DC)
- GND
- CE
- CSN
- MOSI
- MISO
- SCK
- IRQ

Modul ini digunakan pada setiap arduino yang ingin ditransfer. modul ini akan mentransmisikan data yang didapat dari arduino dengan menggunakan pita gelombang RF. Radio Frekuensi (RF) atau Gelombang Radio adalah tingkat osilasi dalam kisaran sekitar 3 kHz sampai 300 GHz, yang sesuai dengan frekuensi gelombang radio, dan arus bolak-balik yang membawa sinyal radio.Data yang ditrasnfer berasal dari Master. Kemudian data yang telah ditransmisikan tersebut akan diterima oleh arduino Slave.
Berikut adalah beberapa fitur dari Modul Wireless RF nRF24L01 :
– Beroperasi pada pada pita ISM 2.4 GHZ.
– Data rate hingga 2Mbps.
– Ultra low power.
– Penanganan paket data otomatis.
– Penanganan transaksi paket otomatis.
– Beroperasi pada pada pita ISM 2.4 GHZ.
– Data rate hingga 2Mbps.
– Ultra low power.
– Penanganan paket data otomatis.
– Penanganan transaksi paket otomatis.
Key Futures
• Worldwide 2.4GHz ISM band operation
• 250kbps, 1Mbps and 2Mbps on air data rates
• Ultra low power operation
• 11.3mA TX at 0dBm output power
• 13.5mA RX at 2Mbps air data rate
• 900nA in power down
• 26µA in standby-I
• On chip voltage regulator
• 1.9 to 3.6V supply range
• Enhanced ShockBurst™
• Automatic packet handling
• Auto packet transaction handling
• 6 data pipe MultiCeiver™
• Drop-in compatibility with nRF24L01
• On-air compatible in 250kbps and 1Mbps with nRF2401A, nRF2402, nRF24E1 and nRF24E2
• Low cost BOM
• Range up to 1100m
• ±60ppm 16MHz crystal
• 5V tolerant inputs
• Compact 20-pin 4x4mm QFN package
Motor Servo SG-90

Spesifikasi untuk motor servo SG-90 berada pada tabel berikut
Operating Voltage
|
4.8 V (~5V)
|
Torque
|
2.5kg/cm
|
Operating speed
|
0.1s/60°
|
Gear Type
|
plastic
|
Rotation
|
0°-180°
|
Weight of motor
|
9g
|
Temperature range
|
0 ºC – 55 ºC
|

4. Flowchart
[Back]
5. Listing Program
[Back]
//Master
#define sensor A0 #include <SPI.h> #include <nRF24L01.h> #include <RF24.h> int data[1]; RF24 radio(9, 10); const uint64_t pipe = 0xE8E8F0F0E1LL; void setup(void) { Serial.begin(115200); radio.begin(); radio.openWritingPipe(pipe); } void loop(void) { int nilai = analogRead(sensor); int sense = map(nilai, 1023, 0, 0, 3); Serial.println(nilai); Serial.println(sense); if (sense == 0) { data[0] = 0; radio.write(data, 1); } if (sense == 1) { data[0] = 1; radio.write(data, 1); } if (sense == 2) { data[0] = 2; radio.write(data, 1); } } |
//SLAVE
#include <SPI.h> #include <nRF24L01.h> / #include <RF24.h> #include <Servo.h> const int rs = 7, en = 6, d4 = 5, d5 = 4, d6 = 3, d7 = 2; Servo Myservo; int data[1]; const uint64_t pipe = 0xE8E8F0F0E1LL; void setup(void) { Serial.begin(9600); radio.begin(); radio.openReadingPipe(1, pipe); Myservo.attach(3); radio.startListening(); } void loop(void) { if (radio.available()) { bool selesai = false; while (!selesai) { selesai = radio.read(data, 1); Serial.println(data[0]); / if (data[0] == 2) { Myservo.write(0); delay(500); Myservo.write(180); delay(500); } if (data[0] == 1) { Myservo.write(0); delay(750); Myservo.write(180); delay(750); } if (data[0] == 0) { Myservo.write(0); delay(1000); Myservo.write(180); delay(1000); } delay(100); } } Serial.println("No radio available"); } } |



8. Video Project
[Back]9. Prinsip Kerja Alat
[Back]
Alat yang kami ciptakan ini adalah Wiper Blade Automatic with Rain Sensor, dimana kecepatan flip-flop dari wiper blade akan berubah tergantung banyaknya intensitas air yang terkena oleh sensor hujan.
Alat yang kami buat ini menggunakan komunikasi nirkabel atau bisa kita sebut WIFI, dengan demikian kita menggunakan 2 arduino uno sebagai microcontroller nya, arduino uno yang terhubung dengan sensor hujan dan lcd 16x2 kita jadikan sebagai Transmitter sedangkan arduino uno yang terhubung dengan motor servo kita jadikan sebagai Reciever.
Ketika Sensor Hujan mendeteksi adanya air, maka Sensor Hujan akan memberikan sinyal ke Arduino Uno yang menjadi Transmitter dan kemudian akan dikirimkan oleh NRF24I01 WIFI dan akan diterima oleh NRF24I01 pada Arduino Uno yang menjadi Reciever, dan kemudian Motor Servo yang menjadi Wiper Blade akan bergerak flip-flop dengan kecepatan yang sesuai dengan banyaknya instensitas air yang dideteksi sensor Hujan. Semakin banyak Intensias air yang dideteksi oleh Sensor Hujan maka semakin cepat pula gerakan flip-flop pada Motor Servo

No comments:
Post a Comment